|
Open Qmin
0.8.0
GPU-accelerated Q-tensor-based liquid crystal simulations
|
|
Open Qmin
0.8.0
GPU-accelerated Q-tensor-based liquid crystal simulations
|

Macros | |
| #define | HOSTDEVICE inline __attribute__((always_inline)) |
Functions | |
| HOSTDEVICE void | qTensorFromDirector (scalar3 n, scalar S0, dVec &q) |
| return a qtensor given a director and a value of S0 More... | |
| HOSTDEVICE scalar | TrQ2 (dVec &q) |
| Tr(Q^2) = Q_{kl}Q_{lk}. More... | |
| HOSTDEVICE scalar | TrQ3 (dVec &q) |
| Tr(Q^3) More... | |
| HOSTDEVICE scalar | TrQ2Squared (dVec &q) |
| (Tr(Q^2))^2 More... | |
| HOSTDEVICE dVec | derivativeTrQ2 (dVec &q) |
| derivative of Tr(Q^2) w/r/t q[0] .. q[4] More... | |
| HOSTDEVICE dVec | derivativeTrQ3 (dVec &q) |
| derivative of Tr(Q^3) w/r/t q[0] .. q[4] More... | |
| HOSTDEVICE dVec | derivativeTrQ2Squared (dVec &q) |
| derivative of (Tr(Q^2))^2 w/r/t q[0] .. q[4] More... | |
| HOSTDEVICE dVec | allPhaseComponentForces (dVec &q, scalar &a, scalar &b, scalar &c) |
| Phase components combined into one for computational efficiency. More... | |
| HOSTDEVICE dVec | QjkQki (dVec &q) |
| Q_{jk}Q_{ki}. More... | |
| HOSTDEVICE scalar | determinantOfQ (dVec &q) |
| determinant of a qt matrix More... | |
| HOSTDEVICE scalar | eigFromVecs (vector< scalar > &eVec, scalar ev0, scalar ev1, scalar ev2) |
| eVec is Q*e, ev0,ev1,ev2 are components ofe More... | |
| HOSTDEVICE void | eigensystemOfQ (dVec &q, vector< scalar > &eVals, vector< scalar > &eVec1, vector< scalar > &eVec2, vector< scalar > &eVec3) |
| get the eigensystem associated with a Q tensor More... | |
| HOSTDEVICE void | eigenvaluesOfQ (dVec &q, scalar &a, scalar &b, scalar &c) |
| Get the eigenvalues of a real symmetric traceless 3x3 matrix. More... | |
| #define HOSTDEVICE inline __attribute__((always_inline)) |
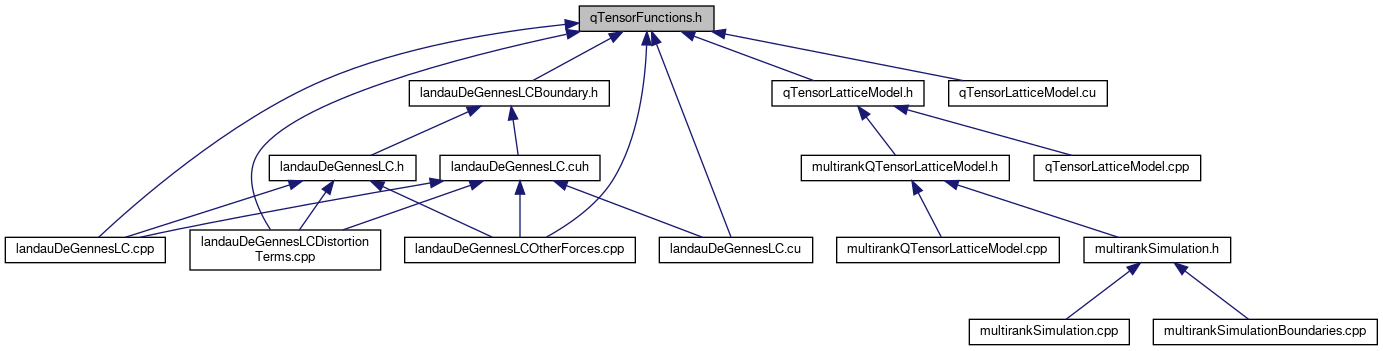
The Q-tensor has five independent components, which will get passed around in dVec structures... a dVec of q[0,1,2,3,4] corresponds to the symmetric traceless tensor laid out as (q[0] q[1] q[2] ) Q = (q[1] q[3] q[4] ) (q[2] q[4] -(q[0]+q[3]) )
This file implements handy manipulations and functions of the Q-tensor as laid out this way
 1.8.15
1.8.15